Overview of the dVRK Community
The da Vinci Research Kit (dVRK) is a community effort supporting research in the field of telerobotic surgery. The Intuitive Foundation supports this effort by facilitating the use of hardware from retired da Vinci Surgical Systems that can be repurposed to assemble research platforms that explore innovative new concepts in minimally-invasive surgery. This shared research platform supports collaboration across university groups to stimulate and accelerate research in the field.
At present, there are dVRKs at more than 30 universities in 10 countries worldwide. These kits support a broad range of research, from the exploration of innovative new ways of performing information- and image-guided surgeries to developing novel surgical instrumentation, innovative user interfaces, and even futuristic surgical task automation methods and their potential impacts.
The Intuitive Foundation supports this research community by expanding access to capable research platforms in order to foster collaboration and the efficient translation of ideas from research to practice.
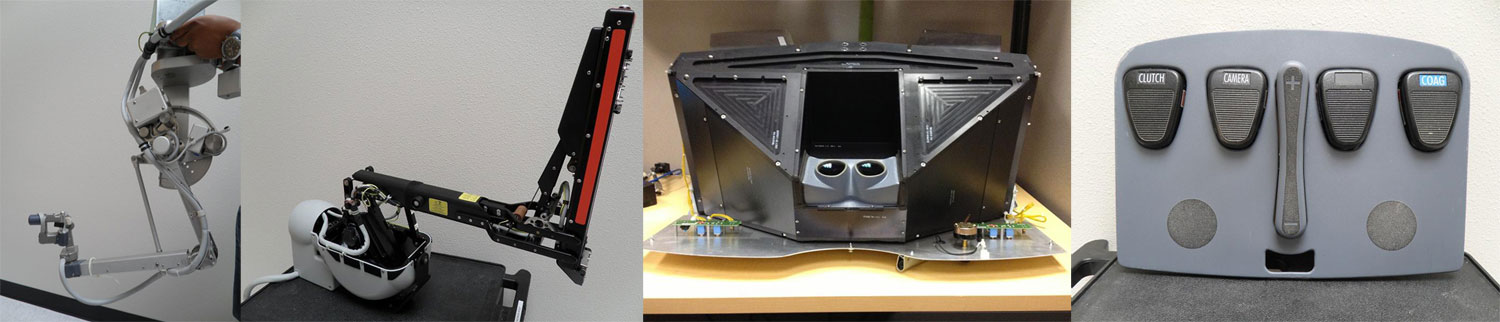
The dVRK contains several of the fundamental components of a robot-assisted minimally-invasive surgery system, including instrument manipulators as well as surgeon interface elements such as a stereo viewer along with hand and foot-pedal controls. These components can be combined to build a functional telerobotic surgery system that can be customized for non-clinical research. The dVRK should not be considered a turn-key system. Rather, it is a series of building blocks that multi-disciplinary engineering teams can use to build and test research prototypes.
There are currently two dVRK community wiki sites:
- https://research.intusurg.com/dvrk
- https://github.com/jhu-dvrk/sawIntuitiveResearchKit/wiki (this wiki is curated by the academic research community, led by researchers at The Johns Hopkins University)
Eligibility, Conditions, and Application Guidelines
Eligibility and Conditions:
- Non-profit education and research institutions are eligible to apply for dVRK hardware and support.
- Hardware may not be available in all geographic regions, due to import restrictions.
- Donated equipment is “Not for Clinical Use” and must not be placed in a hospital operating room for use with human patients.
- Grantees agree to keep donated hardware at the awarded institution unless authorized in writing to move the hardware to a new institution.
- The research team should possess hardware and software engineering capabilities, as well as resources to build and maintain a complex research platform.
- The program prioritizes teams with a demonstrated track record of leveraging and contributing to shared resources and open-source communities.
- Grantees agree in good faith to participate in annual principal investigator meetings and community events. These are typically hosted at popular robotics conferences.
Getting Started
Tell us more about your project, so that we can help you to determine if the dVRK is the right research platform for you. If your submitted application fits the criteria, the next step is getting the dVRK hardware. With the hardware comes the instructions to help you to set up and maintain your dVRK.
Get controller electronics. The controller design is open source, so you can build this yourself, or purchase pre-built hardware.
https://github.com/jhu-dvrk/sawIntuitiveResearchKit/wiki/Hardware#13-controllers
Go to GitHub for instructions on setting up a host PC, on compiling software, and for developing custom applications on top of a common open-source software framework.
https://github.com/jhu-dvrk/sawIntuitiveResearchKit/wiki
Contribute back! The community thrives on collaboration, shared code, tips and tricks, and peer-to-peer support.
Please email dvrk@intuitive-foundation.org with questions regarding the application process.